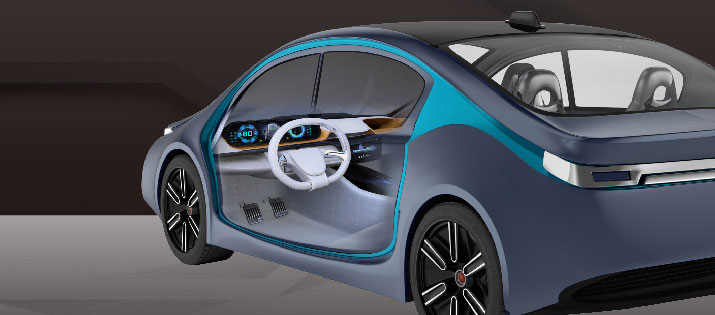
全面検証で無線の死角を発見 Bluetoothキーレスエントリーを安定化
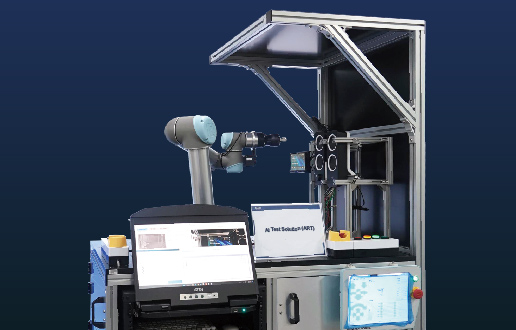
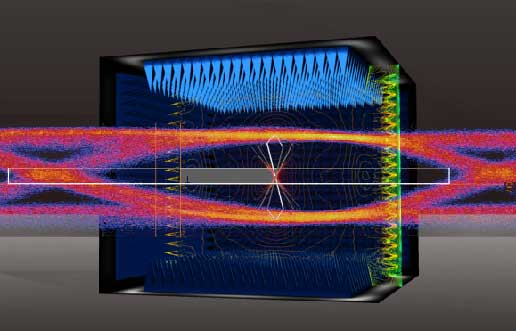
電動自動車への需要が、環境意識の高まりに伴い増加の一途を辿っています。電気自動車がもたらしたのは、これまでの車体構造やデザイン上の成約を取り払ったことによる技術革新に加え、車載周辺機器の進化です。Bluetoothなど無線を活用して操作可能な軽くて薄いアクセサリがスマートデバイスの主流となっており、様々な製品が開発されてきました。 これまで使用されていた物理キーに代わり、Bluetooth技術を採用したキーレスエントリーを導入し始めているのは、まさにスマートデザインの隆盛を物語っています。様々な無線技術の導入によって確かにスムーズで負担の少ないユーザー体験を得られるようになりましたが、一方で設計上困難な点も増えました。設計者は無線パフォーマンスの安定性についても注意が必要です。 全面検証で無線の死角を検出 アリオンの検証チームがテストを行った結果、Bluetoothキーは実際の使用場面においては、使用上の制限によってユーザーエクスペリエンスが損なわれていることが判明しました。検証チームは、電動バイクのBluetoothデバイスの総合放射電力(TRP:Total Radiated Power)と全等方感度(TIS:Total Isotropic Sensitivity)を検証するためにシールドルームでOTA(Over the Air)試験を行いました。その結果、車体にあるBluetoothデバイスの受送信には死角があることが分かりました。下図が表す凹んだ部分が死角になります。つまりこの角度からアンロックやロックの指示を送っても、バイクは何の反応もしません。想像してみてください。路傍にバイクを置き一時的に愛車から離れます。用事を済ませて帰ってきて普段どおりアンロックしようと思っても動作しなかったとしたら…。原因が分からないあなたはきっと焦燥感を覚えることでしょう。 TRSとTIS試験で分析した結果、この電動バイクは特定の方角からのBluetooth信号をキャッチできないようです。ユーザーがその方角にいた場合、アンロックできない可能性が高いということです。 無線品質のことなら - アリオンRF検証ラボ 無線製品の性能は様々な外因・内因から影響を受けます。例えばノイズ・同一チャネル干渉・隣接チャネル干渉、さらに使用者の習慣・使用環境などが無線性能低下の原因になり得ます。開発者は製品に導入する無線技術が標準仕様・法令制限に適していることを確認するほか、製品検査を全面的に行って問題点をいち早く特定し、解決策を打ち出すことが大切です。 [...]